


Aplicarea nivelmentului trigonometric pentru monitorizarea deformațiilor verticale ale unor obiective inginerești
Constantin Chirilă*, Raluca Maria Albu
“Gheorghe Asachi” Technical University of Iasi,Faculty of Hydrotechnics, Geodesy and Environmental Engineering, Department of Terrestrial Measurements and Cadastre, 65 Dimitrie Mangeron Blvd, 700050, Iasi, Romania
* Author to whom all correspondence should be addressed: e-mail: constantin_ch78@yahoo.com, ralucaalbbu@gmail.com
Rezumat
Dintre metodele geodezice de măsurare a deformațiilor verticale ale construcțiilor și terenurilor, nivelmentul geometric este cel mai precis, dar totodată necesită respectarea unor condiții specifice de pantă și accesibilitate în teren. În situațiile în care nivelmentul geometric este mai dificil sau chiar imposibil de aplicat, nivelmentul trigonometric poate constitui o soluție practică viabilă, dacă se urmăresc o serie de proceduri care să îmbunătățească precizia rezultatelor finale. Pentru cazul măsurătorilor geodezice clasice, unde geometria rețelei de urmărire are un rol determinant, soluția obținerii diferențelor de nivel cu o precizie mare are în vedere asigurarea unor erori medii pătratice cât mai mici pe direcția verticală a sistemului de coordonate ales. În acest sens, întreaga rețea de urmărire se va alinia într-un singur plan vertical, astfel încât determinarea altitudinii punctelor de control să rezulte printr-o intersecție înainte, calculată în plan vertical. Metoda de compensare va include în modelul funcțional doar măsurătorile de unghiuri zenitale, distanțele orizontale fiind utilizate numai pentru determinarea coordonatelor reperilor într-un sistem rectangular în plan vertical. Astfel, prin geometria impusă rețelei, coordonatele punctelor noi vor avea o componentă mai slab determinată pe direcția aliniamentului punctelor de sprijin și o componentă precis determinată pe direcția altitudinii. Din punct de vedere grafic, în urma compensării rețelei prin metoda celor mai mici pătrate, vor rezulta elipse ale erorilor cu o conformație geometrică foarte alungită, acestea fiind turtite pe direcția de interes a altitudinii.
Studiul de caz a constat în aplicarea metodei pentru o zonă a unui pod pietonal, în care s-a simulat deplasarea pe verticală prin intermediul unor reperi la sol reglabili pe înălțime. S-au efectuat două cicluri de măsurători pentru a se pune în evidență deplasările pe verticală, comparativ cu rezultatele obținute din măsurătorile de nivelment geometric. Rezultatele au arătat, că pentru distanțe scurte, diferențele obținute pentru altitudinile punctelor de control între cele două metode s-au situat în intervalul [2,1 ÷ 5,7 mm] în cele două cicluri de măsurători, iar diferențele de nivel calculate între cele două cicluri succesive pentru toate punctele de control s-au încadrat în intervalul de precizie [0,8 ÷ 1,9 mm]. Pentru distanțe lungi, această procedură de aplicare a nivelmentului trigonometric ar putea aduce rezultate îmbunătățite diferențelor de nivel, care să compenseze influența erorilor datorate refracției atmosferice verticale asupra unghiurilor zenitale măsurate.
Cuvinte cheie
nivelment trigonometric, altitudine, diferență de nivel, deplasări verticale, intersecție înainte, elipsa erorilor
- Introducere
Dintre metodele geodezice de monitorizare a deformațiilor verticale, cea mai precisă și în general, cea mai utilizată este metoda nivelmentului geometric. În anumite condiții speciale însă, atunci când traseul are o pantă accentuată sau prezintă discontinuități care împiedică desfășurarea unei linii de nivelment, soluția este cea a aplicării nivelmentului trigonometric.
Metoda nivelmentului trigonometric este limitată ca precizie de lungimea vizei, odată cu creșterea acesteia diferența de nivel măsurată fiind puternic influențată de fenomenul refracției atmosferice verticale. Întrucât, în general, monitorizarea obiectivelor inginerești se încadrează în domeniul distanțelor mici, de câteva sute de metri, aplicarea atentă și adecvată a nivelmentului trigonometric se poate apropia ca precizie de cea a nivelmentului geometric.
În acest sens, se va proiecta o rețea de monitorizare care va cuprinde cel puțin 4 reperi ficși și un număr optim de reperi de control amplasați pe corpul construcției urmărite.
Practic, se propune determinarea cotelor reperilor noi printr-o intersecție înainte în plan vertical din punctele vechi de coordonate cunoscute (reperi ficși). Compensarea rețelei se va efectua prin metoda celor mai mici pătrate, întrucât există un surplus de măsurători față de strictul necesar. O astfel de abordare oferă o imagine completă asupra preciziei rezultatelor obținute, având avantajul de a evidenția erorile mici ce rezultă pe direcția verticală, ca urmare a configurației speciale a geometriei rețelei.
Testarea metodei s-a efectuat pentru un pod pietonal din zona Municipiului Iași, pe o distanță mai mică de 100m. Simularea tasării între două cicluri ale măsurătorii s-a realizat prin deplasarea controlată a reperilor de control, comparația rezultatelor obținute făcându-se în raport cu mărimile rezultate din măsurătorile de nivelment geometric.
- Metoda intersecției înainte în plan vertical
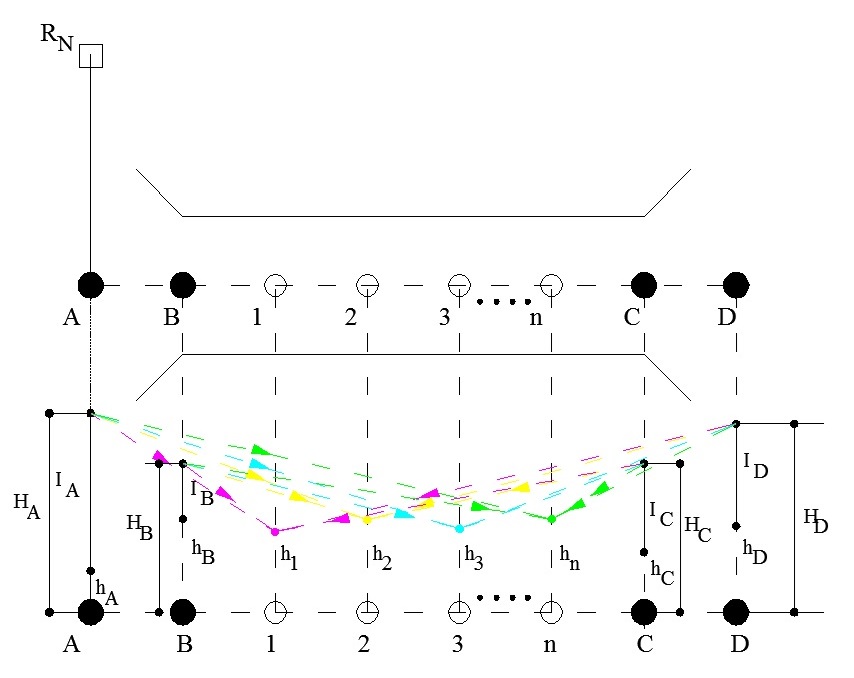
Principiul metodei constă în staţionarea unui număr de cel puțin 4 puncte fixe, de cotă cunoscute (A, B, C, D), din care se efectuează inițial măsurători de distanțe și apoi, în fiecare ciclu, măsurători de unghiuri zenitale către punctele de control (1 ,2, … , n) ale căror cote se cer a fi determinate (Fig. 1).
Fig. 1 Principiul metodei intersecţiei înainte în plan vertical
Pentru un punct nou, cota acestuia va rezulta într-un sistem de coordonate situat în plan vertical, aplicând metoda intersecției unghiulare înainte, printr-o prelucrare riguroasă, bazată pe principiul celor mai mici pătrate.
Acest lucru este posibil întrucât pentru fiecare punct nou, vor rezulta 4 vize de determinare, deci un surplus de măsurători necesar aplicării principiului de minim (Fig. 2).
Sistemul de axe de coordonate (d,H) se consideră cu originea naturală în punctul A, având:
- Axa d, situată în plan orizontal pe direcția aliniamentului ce unește cele 4 puncte vechi (A, B, C, D);
Axa H, pe direcția verticalei locului în punctul de stație A.
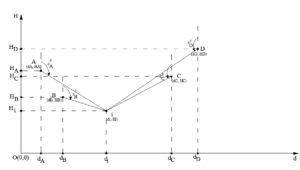
Fig. 2. Intersecţia înainte – în plan vertical (d, H)
Originea sistemului de axe se va transla spre stânga (în sensul invers direcției către punctele B, C, D) cu o valoare rotundă (exemplu: dA = 100 m).
Astfel, coordonatele punctului A în sistemul translat (d,H) vor fi:
- dA = 100 m;
- HA = hA + IA.
Pentru coordonata HA se are în vedere să se adauge la cota punctului (hA) și înălțimea instrumentului în stație (IA). Pentru celelalte puncte vechi coordonata (d) se va obține din coordonata (d) a punctului A (dA), la care se va adăuga distanța redusă la orizont dintre punctul A și punctul dat (B, C, D):
- dB = dA + DAB;
- dC = dA + DAC;
- dD = dA + DAD.
Coordonata H a punctelor vechi (B, C, D) va rezulta ca și în cazul punctului A, prin adăugarea înălțimii instrumentului la cota punctului considerat:
- HB = hB + IB;
- HC = hC + IC;
- HD = hD + ID .
Pentru determinarea mărimilor provizorii ale coordonatelor (d, H) ale punctelor noi, se pot aplica formulele cunoscute de la intersecția unghiulară înainte în plan orizontal, cu adaptările necesare pentru situația din plan vertical:
- Orientările θ ale direcțiilor din punctele vechi, aflate în stânga punctului nou, se înlocuiesc cu mărimile unghiurilor zenitale măsurate (zo);
- Orientările θ ale direcțiilor din punctele vechi, aflate în dreapta punctului nou, se înlocuiesc cu mărimile (400-zo), unde zo este unghiul zenital măsurat spre punctul nou.
Pentru exemplu, conform figurii 2, rezultă următoarele relații de calcul al coordonatelor (d,H) pentru punctul nou (2), obținute din combinația punctelor vechi A și D:
Coordonatele provizorii ale punctelor noi vor intra mai departe în prelucrarea riguroasă pe baza principiului celor mai mici pătrate, prin metoda măsurătorilor indirecte. În cadrul modelului funcțional – stohastic, cea mai importantă parte o reprezintă formarea sistemului ecuațiilor de corecții. Numărul total al ecuațiilor de corecții va fi egal cu numărul vizelor efectuate din fiecare punct vechi către același punct nou. În acest mod, modelul de compensare se va aplica repetat pentru fiecare punct nou în parte. Scrierea unei ecuații de corecție se va face distinct, funcție de poziția la stânga sau la dreapta a punctului vechi față de punctul nou.
Cazul 1 (când punctul vechi se află la stânga față de punctul nou) – exemplu A-1 (Fig. 3)
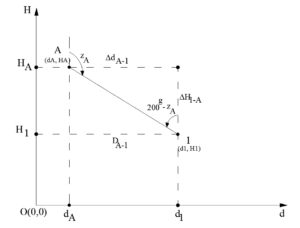
Fig. 3 Schiță determinare punct nou 1 (Cazul 1)
Din figura 3 se observă că:
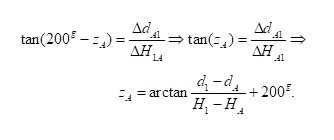
Pentru liniarizarea funcției zA se va aplica dezvoltarea în serie Taylor în jurul punctului 1 de coordonate provizorii , reținându-se numai termenii de ordinul I:
unde ![]()
Din egalitatea:

unde:
Pentru exprimarea derivatelor parțiale din relația de mai sus ca variație în secunde pe unitatea de metru, se introduc notațiile pentru coeficienții:
Astfel, ecuația ce exprimă variația unghiului zenital în funcție de variația coordonatelor rectangulare (d, H), va fi:
![]()
Întrucât din punctul A se execută mai multe observații ale unghiului zenital către punctul nou 1, va rezulta un unghi mediu măsurat ca medie aritmetică a celor “n” determinări individuale:
![]()
Acestei mărimi provizorii i se va adăuga corecția (vA-1) pentru calculul mărimii compensate a unghiului zenital (zA):
![]()
De aici, rezultă:
![]()
Pentru exprimarea în secunde a corecției, se va scrie:
unde ![]()
- Cazul 2 (când punctul vechi se află la dreapta față de punctul nou) – exemplu C-1 (Fig. 4).
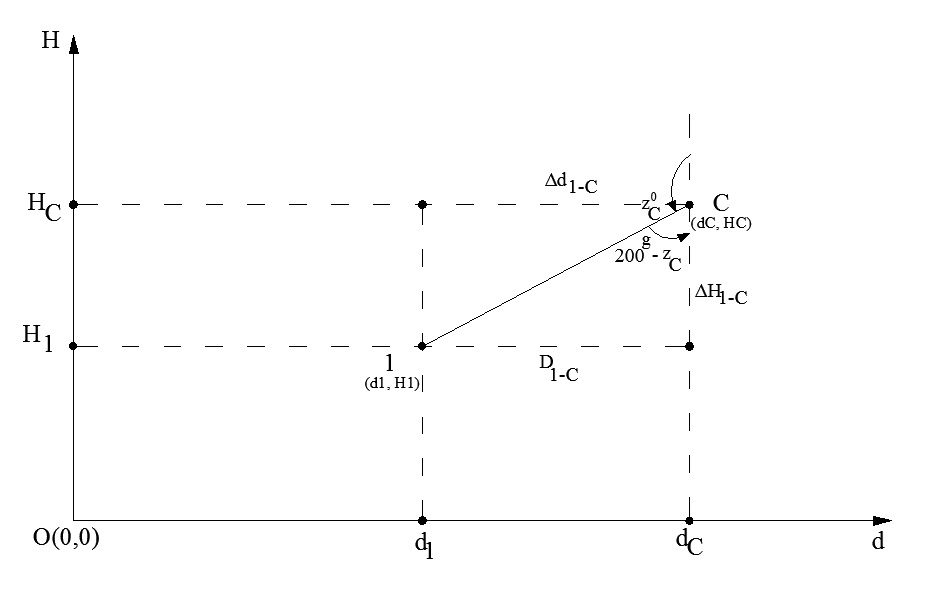
Fig. 4 Schiță determinare punct nou 1 ( Cazul 2)
Din figura 4, se observă că :
Pentru liniarizarea funcției zC se va aplica dezvoltarea în serie Taylor în jurul punctului 1 de coordonate provizorii , reținându-se numai termenii de ordinul I:
Din egalitatea:

unde:
Astfel, ecuația ce exprimă variația unghiului zenital în funcție de variația coordonatelor rectangulare (d, H) va fi:
![]()
Întrucât din punctul C se execută mai multe observații ale unghiului zenital către punctul nou 1, va rezulta un unghi mediu măsurat ca medie aritmetică a celor “n” determinări individuale:
![]()
Acestei mărimi provizorii i se va adăuga corecția (vC-1) pentru calculul mărimii compensate a unghiului zenital (zC):
![]()
De aici, rezultă analog primului caz:
![]() unde
unde ![]()
În continuare, ecuațiile de corecții se grupează matriceal după algoritmul standard:
Br2X21 + Lr1 = Vr1, cu matricea ponderilor Prr, unde r reprezintă numărul vizelor din punctele vechi (r = 4);
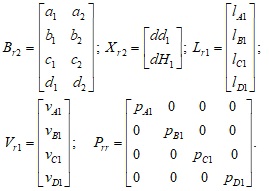
Ponderea fiecărei ecuații corespunde inversei pătratului erorii de determinare a unghiului zenital mediu măsurat:
![]()
Trecerea la sistemul ecuațiilor normale se face pe baza condiției de minim [pvv] → min, rezultând următoarea formă matriceală:
N2,2X2,1 + T2,1 = O2,1 ,
unde N2,2 = (B2r)T Prr Br2, T2,1 = (B2r)T Prr Lr1.
Necunoscutele sistemului se obțin din rezolvarea sistemului normal prin procedeul inversării matricei:
X21 = – (N2,2)-1 T2,1 = – Q2,2 T2,1 ,
unde Q2,2 = – (N2,2)-1.
Mărimile compensate ce rezultă în finalul prelucrării vor fi:
- Unghiurile zenitale:

- Coordonatele rectangulare (d, H) ale punctului nou:
![]()
După verificarea finală a compensării, în care unghiurile zenitale compensate trebuie să fie egale cu cele calculate din coordonatele compensate ale punctului nou și cele cunoscute ale punctelor vechi, se parcurg etapele de evaluare a preciziei rezultatelor:
- calculul erorii medii pătratice a unității de pondere:

- calculul erorilor medii pătratice ale mărimilor reale ale unghiurilor zenitale măsurate pe teren:

- calculul erorilor medii pătratice ale coordonatelor compensate ale punctelor noi:

unde ![]() sunt coeficienții de pondere pătratici ai necunoscutelor sistemului (d, H).
sunt coeficienții de pondere pătratici ai necunoscutelor sistemului (d, H).
În acest caz, eroarea care interesează în mod special este eroarea medie pătratică de determinare pe cote. Datorită configurației geometrice speciale de măsurare a unghiurilor zenitale, această eroare va fi foarte mică, în timp ce pe direcția orizontală, care nu prezintă interes, aceasta va crește foarte mult.
- Studiu de caz: aplicarea nivelmentului trigonometric pentru monitorizarea deformațiilor verticale ale unui pod pietonal
Obiectivul studiat a fost ales podul pietonal Trancu, situat în Municipiul Iași, zona Splai Bahlui (Fig. 5).

Fig. 5. Obiectivul studiat: podul pietonal Trancu
În vederea monitorizării deformațiilor verticale ale obiectivului studiat, reperii de control situați pe corpul construcției au fost coborâți în mod controlat, pentru a simula o eventuală tasare a podului între două cicluri succesive de măsurători. Pentru aplicarea metodei nivelmentului trigonometric, măsurătorile de distanțe și unghiuri zenitale s-au realizat cu stația totală LEICA TCR 407. Pentru comparație, s-au executat în paralel măsurători ale diferențelor de nivel prin nivelment geometric, cu ajutorul nivelei LEICA Sprinter 100M.
În cadrul rețelei de nivelment trigonometric, reperii A, B, C, și D se vor considera reperi ficși, de cotă cunoscută, astfel încât trebuie ca de la început, aceștia să fie determinați pe altitudine, folosind metoda precisă a nivelmentului geometric. Pentru aceasta, s-a executat o drumuire de nivelment geometric, având ca reper de cotă cunoscută RN (HRN = 100 m), funcție de care s-au obținut cotele reperilor ficși A, B, C, D (Fig. 6).
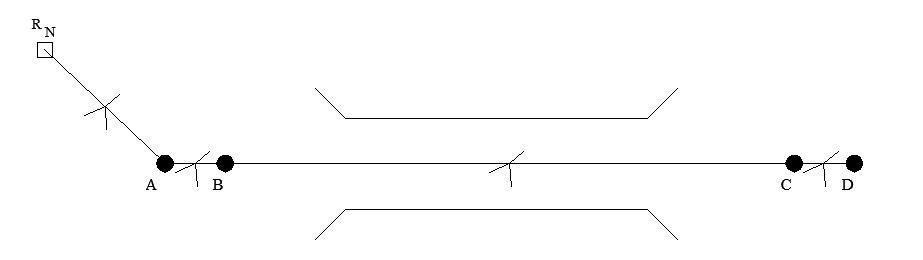
Fig. 6. Schița drumuirii de nivelment geometric
Ca etapă preliminară, necesară compensării riguroase a rețelei de nivelment trigonometric s-au determinat și distanțele orizontale din punctul A către reperii ficși (B,C,D) și de control (1,2,3) pentru calculul coordonatelor provizorii ale acestora în sistemul rectangular vertical (Fig. 7).
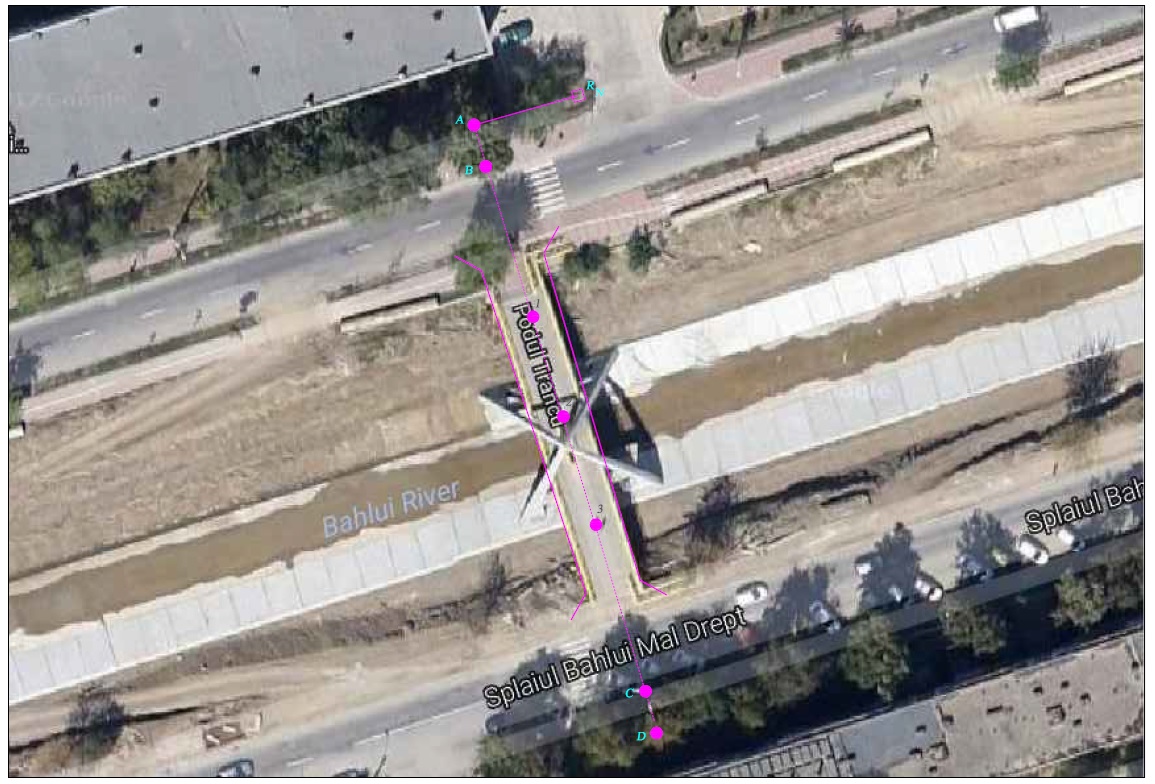
Fig. 7. Schița rețelei de nivelment trigonometric
Astfel, rețeaua de nivelment trigonometric proiectată este alcătuită din 4 reperi de coordonate cunoscute (d,H) și din 3 reperi noi, ale căror cote urmează să fie determinate prin măsurători unghiulare în cele două cicluri de observații. Pentru fiecare punctul nou al rețelei se prezintă elementele măsurate în teren, respectiv unghiurile zenitale din punctele de stație ale reperilor ficși (Fig. 8).
În urma aplicării procedeului prezentat teoretic anterior, au rezultat coordonatele compensate (d,H) ale reperilor de control, cu erorile medii pătratice aferente fiecărui ciclu de măsurători.
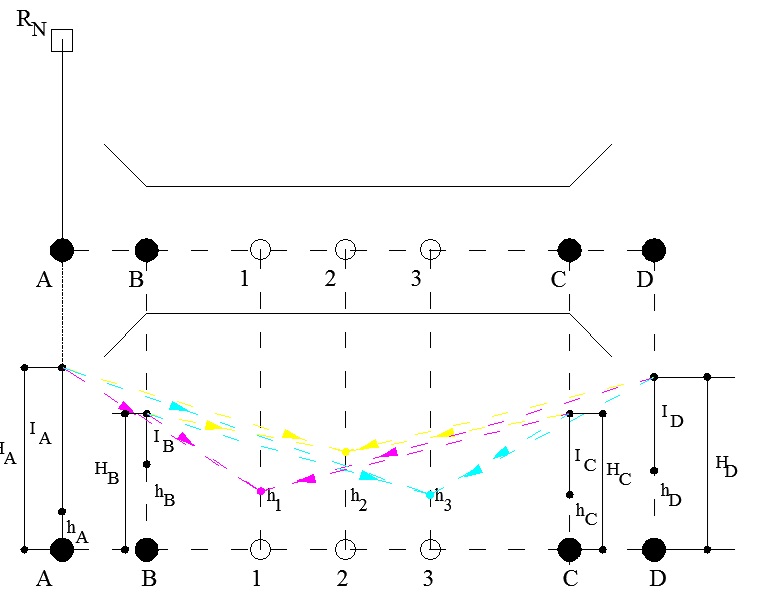
Fig. 8 Schița vizelor din rețeaua de nivelment trigonometric
Pentru o evaluare a preciziei rezultatelor obținute prin metoda nivelmentului trigonometric se vor selecta spre analiză doar erorile medii pătratice de determinare a cotelor reperilor noi în fiecare ciclu de măsurători (Tab. 1).
Tab. 1. Erorile medii pătratice ale mărimilor compensate ale cotelor
| Reper nou | Erorile medii pătratice ale mărimilor compensate ale cotelor, sH [mm] | ||
| ciclul 0 | ciclul 1 | ||
| 1 | 0.5 | 0.1 | |
| 2 | 0.5 | 0.5 | |
| 3 | 0.2 | 0.2 | |
Se observă că intervalul de valori în care se încadrează eroarea medie pătratică de determinare a cotelor (sH) este de [0,1 – 0,5mm].
Pentru o comparație a preciziei globale de compensare a rețelei în cazul fiecărui punct nou, se prezintă eroarea medie pătratică a unității de pondere (s0) obținută în ambele cicluri de măsurători (Tab.2).
Tab. 2. Evaluarea preciziei globale de compensare a rețelei
| Reper nou | Eroarea medie pătratică a unității de pondere (s0) | ||
| ciclul 0 | ciclul 1 | ||
| 1 | 2,010766 | 1,235451 | |
| 2 | 2,394738 | 1,847033 | |
| 3 | 1,948683 | 1,265024 | |
Se face observația că pentru reperul nr. 2, măsurătorile din teren în ciclul 1 au fost afectate de erori mari. În urma analizei datelor s-a identificat eroarea în stația D, aceasta din urmă fiind eliminată din modelul de compensare pentru a îmbunătăți precizia de determinare a reperului nou 2.
Pentru comparația rezultatelor obținute cu cele ale măsurătorilor de nivelment geometric, pentru fiecare din cele două cicluri de măsurători, s-au calculat diferențele între cotele obținute prin nivelment trigonometric și cele din nivelmentul geometric (Tab.3).
Tab.3. Diferențe de cote între nivelmentul trigonometric și cel geometric
| Reper nou | Diferențe de cote între nivelment trigonometric – nivelment geometric (mm) | |
| ciclul 0 | ciclul 1 | |
| 1 | 3,9 | -2,1 |
| 2 | 5,7 | 4,8 |
| 3 | 3,7 | 5,0 |
O altă comparație edificatoare poate fi realizată între diferențele de nivel rezultate între cele două cicluri de măsurători, o dată din determinări de nivelment trigonometric și respectiv din cele de nivelment geometric (Tab. 4).
Tab 4. Diferențe de cote între ciclurile de măsurători
| Reper nou | Diferențe de cote între ciclurile de măsurători (mm) | Diferențe
(mm) |
||
| Nivelment trigonometric (NT) | Nivelment geometric (NG) | NT-NG | ||
| 1 | 6.0 | 7.9 | -1.9 | |
| 2 | 6.1 | 5.2 | 0.9 | |
| 3 | 6.6 | 7.8 | -1.3 | |
Se observă că diferențele de valori obținute între cele două metode abordate (nivelment trigonometric și nivelment geometric), se încadrează în intervalul de mărimi [0.9-1.9mm]. Apropierea rezultatelor finale între cele două metode, se datorează în acest caz și faptului că prin diferențele de cote între cele două cicluri, se elimină o serie de erori ce apar în cadrul metodei nivelmentului trigonometric, în special la măsurarea înălțimii aparatului în stație, care nu s-a modificat între ciclurile succesive de observații.
- Concluzii
Lucrarea propune o metodă de aplicare a nivelmentului trigonometric într-o rețea de monitorizare a deformațiilor verticale, care să conducă la determinarea cotelor punctelor de control cu o precizie îmbunătățită.
Modelul funcțional al compensării prin metoda celor mai mici pătrate conține doar măsurătorile de unghiuri zenitale, întreaga prelucrare fiind adaptată la un sistem de coordonate rectangular în plan vertical.
Principiul determinării cotelor reperilor noi se bazează pe
calculul intersecției înainte în plan vertical, din cel puțin 4 puncte de coordonate cunoscute (reperi ficși), dispuși pe un singur aliniament.
Datorită configurației geometrice speciale de intersecție a vizelor în punctele noi sub unghiuri obtuze, aceasta va conduce la elipse ale erorilor extrem de turtite, ce evidențiază erori mici pe direcție verticală, de determinare a cotelor și erori mari pe direcția orizontală, dar care nu prezintă interes.
În urma evaluării preciziei rezultate din aplicarea metodei în studiul de caz, erorile medii pătratice de determinare a cotelor reperilor noi au fost mai mici de ± 0.5 mm. În raport cu cotele obținute prin nivelment geometric, diferențele s-au situat sub valoarea de 5,7 mm. Comparând diferențele de nivel rezultate între cele două cicluri de măsurători, prin nivelment trigonometric și respectiv geometric, maximul valorilor s-a situat sub valoarea de 1,9 mm.
În concluzie, se poate aprecia că metoda este viabilă și poate fi aplicată cu succes pe distanțe scurte, atunci când din motive obiective nu se poate aborda nivelmentul geometric.
Ca perspective de cercetare ar fi util să se studieze același tip de rețea pe distanțe mai lungi, observând efectul refracției atmosferice verticale asupra determinării unghiului zenital.
Se recomandă să se acorde o atenție deosebită la măsurarea precisă a înălțimii aparatului în stație, dar dacă acesta nu se modifică între ciclurile de măsurători, ar putea fi eliminată prin calculul diferențelor de nivel între determinările succesive. Nu în ultimul rând, folosirea unei stații totale performante, ar conduce la rezultate îmbunătățite, deci la erori medii pătratice ale cotelor compensate mai mici.
Bibliografie
Chirilă C., Geodezie matematică. Îndrumător de lucrări practice și proiect, Ed. Tehnopress, Iaşi, 2014.
Ghiţău, D., Geodezie şi gravimetrie geodezică, Editura Didactică şi Pedagogică, Bucureşti, 1983.
Ghilani D.C., Wolf P.R., Adjustment computations. Spatial data analysis. Fourth edition, John Wilwy & Sons, Inc, Hoboken, New Jersey, S.U.A., 2006.
Moldoveanu C., Geodezie. Noţiuni de geodezie fizică şi elipsoidală, poziţionare, Editura Matrix Rom, Bucureşti, 2002.
Nistor G., Onu C., Andrei C.O., Chirilă C., Determination of atmospheric refraction coefficients used at calculation of triangulation points heights through trigonometric geodetic levelling, Cadastre Journal, University “1 decembrie 1918” Alba Iulia, no. 2, Ed. Aeternitas Alba Iulia, 2002.
Nistor G., Teoria compensării măsurătorilor geodezice. Editura Universității Tehnice ”Gheorghe Asachi” din Iași, 1996.
Nistor G., Geodezie aplicată la studiul construcțiilor. Editura”Gheorghe Asachi” , Iași, 1993.
Torge W., Geodesy. 3rd Edition, Berlin, Germania, 2001.


